Sections
- Abstract
- Introduction
- Analysis
- Harmonic Considerations
- Evidence
- Correlating the Theory with the Evidence
- Discussion & Conclusions
- Afterword
- Glossary of Terms
Abstract
Translational Harmonic Motion: The Nub of the Theory
When a force is applied to an unrestrained elastic object in free space it creates a localized area of high pressure, adjacent to the struck surface. This area of high pressure is then transmitted as a travelling pressure wave to the object's tip, permanently displacing all of the object's individual elements in a forward position in its wake.
This unidirectional action is basically because the object's 'unrestrained condition' means that no restoring force is present, capable of returning its elements to some 'absolute equilibrium position' in space, as is the case with a 'fixed' medium.
Then, when the pressure wave finally reaches the object's tip, this bulges forward (to be permanently displaced in a forwards position), as this is a solid/air boundary and can offer no resistance to the thrusting pressure wave.
An area of low pressure then forms below the object's extended tip to now travel as a reflected longitudinal wave of rarefaction back towards the object's base.
Importantly, in its wake, this backwards travelling wave of rarefaction also displaces all of the object's individual elements in a forwards position as it passes. Then, when it eventually strikes the base, it 'sucks' this inwards/forwards (thus permanently displacing the object's rear in forwards position), as this is likewise a solid/air boundary and can offer no resistance to the area of low pressure 'pulling in on it'.
The backwards travelling wave of rarefaction is then reflected as a forwards travelling pressure wave so that the process repeats itself. In particular the forwards travelling pressure wave and backwards travelling wave of rarefaction interact so that harmonic motion develops at the fundamental or higher frequencies of the object. As a result, the sinusoidally waxing and waning waves of pressure and rarefaction have the effect of continuously displacing each of the object's individual elements in a forwards direction with respect to time.
In terms of the whole object, then, this process creates a 'jerky' form of translational motion that could correctly be called translational harmonic motion.
In this blog the theoretical underpinnings of translational harmonic motion are developed by the author and the evidence supporting it as a form of motion in the real world is outlined. The broad implications of translational harmonic motion are also discussed.
Introduction
Everyone is familiar with simple harmonic motion (SMH). There are numerous examples of it, such as a swinging pendulum or a steel ball rolling backwards and forwards in a curved dish.
Simple harmonic motion occurs when the restoring force in a system is proportional to the displacement from the equilibrium position in that system. Push a swing and it will move backwards and forwards about its resting position.
But is a second form of ‘harmonic motion’ possible? ‘Harmonic motion’ is basically any type of motion that is ‘periodic’. ‘Translational motion’, by contrast, is movement by a body from one point in space to another point in space, and it is generally considered to be ‘smooth’.
Throw a ball in the air and then it will keep moving in a non-jerky manner until it hits something.
Or that’s the story. But could that translational movement actually be periodic and could that periodic movement then drive the object’s journey through space?
What such a form of motion might look like is depicted below.
Surprisingly a very solid argument can be made that this is indeed the case using the sort of simple entry level-non-controversial physics that is taught in high school. Nothing fancy.
The aim of this blog is to do just this. To demonstrate that translational harmonic motion is fully compatible with bog-standard well known physical principles and in fact actually seems to be the natural outcome of an object being ‘struck’. The nuts and bolts of the case are presented below.
Analysis
If a flexible (elastic) object such as a ball is dropped it will fall and hit the ground generating an internal pressure wave as it does so, before bouncing upwards. The key to understanding the outcome of this situation is to analyse the likely nature and fate of this pressure wave.
Consider a flexible rod of length L. This rod is dropped, and its base is compressed as the rod is squeezed against the ground. At the point of maximum compression the rod is thus shortened by a distance of x and a localized area of pressure will have formed at its base.
As the rod is an elastic medium this area of localized pressure then transmits as a travelling (pressure) wave towards the top (forward end) of the rod, while the base initially remains in its original position. Crucially, this compression wave displaces all of the elements of the rod in a forwards position as it passes (that is, compared with where they would be if the rod continued on its downwards trajectory).
At some point the pressure wave reaches the top (forward) end of the rod. This area is a solid/air boundary, and the physics of this situation is well known. When a longitudinal (pressure) wave travelling through a dense medium is incident to the boundary of a rarer medium the surface of separation is pushed outward, as little resistance is offered.
An area of rarefaction then forms behind the tip and this area of low pressure subsequently travels in a backwards direction as a ‘reflected wave’ see article.
So following the reflection the tip of the rod is displaced forward, and a wave of rarefaction (low pressure) has been created that travels backwards towards the origin.
Importantly, this wave will also permanently displace all of the rod’s elements in a forward position in its wake.
When the wave of rarefaction encounters the back end of the rod the situation is reversed. Here the surface of separation is ‘sucked inwards’ (forwards) by the wave’s low pressure, and a reflected pressure wave forms which then propagates in a forwards direction, once more displacing the all of the rod's elements in a forwards direction as it passes.
In simple terms, then, the elements of the rod and the tip will be repetitively pushed forwards by a forwards-travelling pressure wave and pulled forwards by a backwards travelling wave of rarefaction that also retracts the rear, as can be visualized in the below animation.
Harmonic Considerations
Objects have sets of particular frequencies at which they will vibrate in a repetitive way (think of a tuning fork). These frequencies are their ‘harmonic frequencies’, and the fundamental frequency or first harmonic is the lowest of these. A second, third and fourth harmonic etc. then follow; each with successively higher frequencies. At any other frequencies, vibrations are non-repetitive.
So what is the fundamental frequency of the rod? The rod clearly has displacement antinodes located at each of its ends, as here longitudinal movement is unrestricted. This means that the smallest wave that the rod can accommodate is one half of a wavelength (i.e. L = λ/2). The addition of the reflected wave then produces a displacement node in the centre of the rod, which together represent the rod’s fundamental frequency.
This situation has clear similarities with that of the harmonics of a doubly open ended air pipe. In the pipe’s case displacement antinodes are also present at its two open ends, and there is a central displacement node see article. But there are clear differences.
Firstly, when a pressure wave reaches the open end of the pipe its air molecules do work on the atmosphere’s surrounding molecules which are pushed outwards, so that energy is lost to the system. Alternatively when a wave of rarefaction reaches the pipe’s open end, air molecules are sucked into the pipe and once again work is done, and energy is lost to the system. In the case of the rod, however, no energy is lost to the system as any displacement only ever involves the rod’s own elements.
Secondly, within the pipe, molecules are displaced backwards and forwards around an equilibrium point to perform simple harmonic motion. In the case of the rod the displacement of its particles is either none, or in a ‘forwards’ direction, as per figure 3.
Thirdly the node in the air pipe represents a point where air displacement is absent. In the rod it represents something else. Now the ascending wave represents a section of a sine wave between 3π/2 and π/2 radians, and the descending wave represents the section of a sine wave between π/2 and 3π/2 radians. So the midpoint (displacement node) is located at π and 2π radians. At any point in time at the rod’s midpoint, therefore, the particle’s acceleration is zero (sin (π) = sin (2π) = 0), while its velocity is non zero. In other words at the node the rod is travelling at a constant velocity equal to one speed unit.
Fourthly, at the antinodes the maximum longitudinal displacement is two units of distance. At the node it is one unit. The same applies for velocity, so the maximum velocity at the antinodes is exactly twice the velocity of the node.
Fifthly, each successive higher harmonic of the rod contains an additional displacement node. So one extra unit of (constant) velocity will be added per unit of time for each successive higher harmonic. In other words, as the number of (longitudinal) displacement cycles increase per unit time the velocity of the rod is increased in a discrete series of steps equal to one unit of displacement.
Finally, for the fundamental frequency and other odd harmonics (1,3,5...), the surging of the tip and the retraction of the base should be out of phase by 180°/π radians, while for even numbered harmonics (2,4,6...) there should be no phase difference.
Evidence
These conclusions are based on well-established physics. Is this an actual form of movement? It is likely any vibrations contributing to this mode of motion are so tiny that they are essentially ‘invisible’. Also the step-wise nature of such motion suggests that it is likely to be a quantum rather than a macroscopic phenomenon.
Nonetheless sizable structures fostering large, low frequency internal vibrations (essentially pressure waves) that permit detailed visualization of their movement do exist, and, careful observation of their dynamic behaviour, does provide a range of evidence that buttresses the case for translational harmonic motion. This evidence is listed below:
Dropping a suspended Slinky - A Slinky is a precompressed helical spring that was invented by Richard James in the early 1940s, which is able to perform a number of 'tricks'. One such illusion is the Slinky's apparent ability to 'defy gravity'. To perform this stunt the demonstrator simply holds a fully extended Slinky above the ground before letting go of it! Contrary to what common sense would dictate, the Slinky collapses from the top down, while its base remains 'magically' suspended in space; until the descending wave of compression finally reaches it, as can be seen in the slow motion video below.
4. Dropping a Suspended Slinky in Slow Motion (Link is to YouTube/'Veritasium'). In fact this simple demonstration is actually saying something quite profound about the nature of translational motion. If you think about the whole Slinky as being a 'particle' then it is clear that its translational motion is fully dependent upon the internal dynamics of the entire Slinky/particle. Prior to its release the force of gravity has extended the spring until an equilibrium point is reached where the upwards and downwards pointing forces cancel each other out.
However once it has been released by the demonstrator its elements are able to 'pull together'. The point is this doesn't occur instantaneously. Instead it occurs as a compression wave that sweeps down from the Slinky's top to its base. Critically, it is only when this wave reaches the bottom of the Slinky that the base is finally able to fall under the force of gravity.
The key point here is that the changed conditions caused by the release of the Slinky are not instantaneously communicated to all of its elements, but are instead communicated as a travelling wave from its top to its bottom as is explained in the video below by Adam Shomsky.
5. The Physics of the Gravity Defying Slinky (Link is to YouTube/Adam Shomsky). The fully compressed Slinky then behaves in what appears to be a 'normal manner' as it continues to fall under the force of gravity, and if further oscillations are present they are not visible. However, if the Slinky is 'hit' rather than dropped, its continuing wave-like behaviour is seen more easily, as will be detailed a little later.
Falling water droplets - Surface tension dominates the behaviour of water droplets, making them something like miniature water-filled balloons. As such they are quite 'springy' and thus harbour pressure waves (and fluid flows) that are easily visible as changes in their surface dimensions. These changes can be filmed in slow motion and it is clear that falling water droplets undergo a series of cyclical changes as they travel.
In fact as the water droplet detaches from its source its behaviour is initially analogous to the dropped Slinky as its stretched top collapses towards the base. However after this initial event falling droplets then repetitively change shape from an initial oblate (discus shaped) spheroid following their release to a prolate (rugby ball shaped) spheroid and back again as can be seen in the below video.
6. The Falling Water Droplet (Link is to YouTube/'Minutelab'). The key point here is that harmonic motion of some sort rapidly develops as the droplet falls.
The bouncing water droplet - In the above example water droplets are falling under the force of gravity. Water droplets can however also be propelled upwards against gravity, and in one experiment employing an 'oscillating surface' to launch droplets into space the internal dynamics of their motion can be observed particularly clearly.
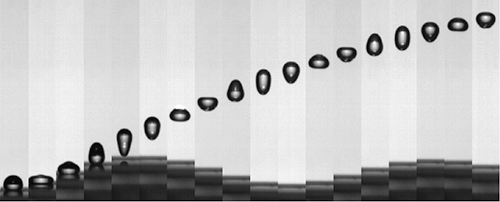
7. The Bouncing Water Droplet (Link for photo is to 'Physics'/Christophe Raufaste) For example in the above time-lapse composite image of the experiment the droplet can be seen to oscillate between an oblate spheroidal and a prolate spheroidal form as it journeys upwards, just as water droplets do on their downwards journey. However unlike the dripping tap the droplet is initially compressed against the surface before an upwards propagating compression wave (and fluid flow and surface tension) elongates the droplet. Finally, the elongated tail is then pulled upwards away from the ground once a wave of rarefaction and surface forces sweeping downwards from its tip connects with the base. This typical motion can also be seen in the slow motion video below.
8. The Bouncing Water Droplet (Link for video is to 'Physics'/Christophe Raufaste) The time-lapse composite image and the above video clearly illustrate certain features of a particle's motion that are particularly supportive of the concept of translational harmonic motion. These are:
- The first step in the droplet's upwards journey is the formation of a (localized) area of increased pressure at its base as the plate below it pulses skywards; as is evidenced by the droplet's sides 'squeezing' outwards due to this compression.
- The tip of the droplet then begins to extend into the air, which must in part be due to an upwards travelling pressure wave pushing its balloon-like top surface towards the sky.
- The upwards extension of the droplet's top surface confirms the well-known physical phenomenon of a solid-air boundary being pushed forward by an internal pressure wave.
- The base of the droplet continues to sit firmly on the plate until the droplet has maximally extended (as evidenced by its long 'stringy' form).
- However once the droplet is fully extended its tail then begins to move upwards. The obvious explanation for this is that a downwards travelling wave of rarefaction is now 'sucking-up' the base towards the sky (with the help of restorative surface forces). In other words the well-known physical phenomenon of a solid-air boundary being pulled inwards by an internal wave of rarefaction is in action.
- Once the droplet has launched into space it clearly begins to develop some form of harmonic motion. But is this simple harmonic motion? If this was simple harmonic motion then the droplet's periodic expansion and contraction should be in phase. This is not the case. As the droplet's tip surges forwards the upwards movement of the base slows and vice versa. In other words the periodic expansion and contraction of the tip and base are out of phase by 180°.
- This periodic upwards thrusting of the tip and lifting of the base appears wax and wane in a sinusoidal manner.
Striking a horizontal Slinky - In the above examples gravity is a confounding factor. It is nevertheless possible to remove the influence of gravity from the equation, and, side-striking a horizontal Slinky provides an excellent example of such gravitational-free movement (a demonstration of this form of movement can be viewed in the video below).
9. Striking a Horizontal Slinky (Link for video is 'Veritasium'/Rod Cross) NB the relevant section is from 2.28 minutes onwards. This demonstration confirms the following points:
- Striking the Slinky generates a pressure wave that immediately travels along the Slinky towards its tip
- The individual elements of the Slinky are left permanently displaced in a forward position following the passage of the forwards travelling pressure wave.
- When the pressure wave reaches the tip it pushes the tip forward as this is a solid/air boundary.
- An area of rarefaction then forms behind the extending tip which subsequently travels in a backwards direction as a travelling wave of rarefaction
- The backward travelling wave of rarefaction can be seen to pull elements of the Slinky forwards as it passes leaving them permanently displaced in forwards position in its wake.
- The Slinky rapidly develops some form of harmonic motion with successive compression waves pushing its elements forwards along with waves of rarefaction that pull its elements (also) forwards.
Bouncing springs
The Bouncing Spring (link to video is 'Physics of Bounce'/Rod Cross)
Observation of the spring's motion indicates that:
- Just as with the dropped Slinky the bottom of the spring starts falling some time after the demonstrator has released its top.
- After the spring has collided with the ground a compression wave can be seen to form at its base, which then travels towards the top end of the spring.
- Once the compression wave reaches the tip it then begins to extend.
- The compression wave is then reflected as a wave of rarefaction, which then travels back towards the base of the spring.
- Once this wave of rarefaction reaches the spring's base this finally retracts.
Bouncing hula hoops - Hula hoops are circular structures formed from numerous lengthy bound fibre elements that resist bending. As such it is possible to observe how their internal 'vibrations' influence their movement as can be seen in the video below
The Bouncing Hula Hoop (link to video is 'Physics of Bounce'/Rod Cross)
Observation of the hoop’s motion readily indicates that:
- An initial area of high pressure forms at its base as it hits the ground.
- Shortly after this the hoop’s nose rapidly extends upwards.
- As the nose’s extension slows the hoop’s base pulls up strongly to leave the ground, before slowing.
- The last two steps repeat themselves.
- Careful observation also reveals that there appears to be a point of constant velocity at the hoop’s centre, while the velocities of the leading and trailing edges of the hoop range from zero to something approaching twice the velocity of the mid-section of the hoop.
- It is noticeable that the accelerations of the leading and trailing edges of the hoop are out of phase by 180° so that the maximum velocity of the leading edge occurs when movement of the trailing edge ceases and vice versa.
Correlating the Theory with the Evidence
The table below matches the theoretical nature of THM with its supporting evidence.
| Theoretical Prediction | Evidence | |
|---|---|---|
| 1, | An area of increased pressure forms at the base of an object after it has been 'struck' (i.e. after a force has acted upon it). | An area of increased pressure can be clearly seen to develop after a force has been applied and is particularly evident in the videos of the bouncing water droplet, the bouncing spring and the horizontally struck Slinky. |
| 2. | The localized area of high pressure creates a travelling pressure wave that sweeps towards the forward end of the struck object. | A clear travelling pressure wave can be seen originating at the base and sweeping towards the forward end of the horizontally struck Slinky and bouncing spring in particular. |
| 3. | The forwards travelling pressure wave permanently displaces the elements of the object in a forwards direction as it passes. | This can be clearly seen to occur in the video of the horizontally struck Slinky. |
| 4. | The forward-facing surface of separation between the object and the air is pushed outwards by the forwards travelling pressure wave as this is a solid/air boundary and cannot offer resistance to a pressure wave. | This can be clearly seen to occur in the videos of the horizontally struck Slinky and bouncing water droplets where their leading surfaces bulge outward as the pressure wave strikes. |
| 5. | An area of low pressure (rarefaction) forms behind the bulging forwards end of the object to create a backwards travelling wave of rarefaction. | This can be clearly seen to occur in the video of the horizontally struck Slinky and bouncing spring. |
| 6. | The backwards travelling wave of rarefaction permanently displaces individual elements of the object in a forwards direction in its wake. | This can be clearly seen to occur in the horizontally struck Slinky and bouncing spring. | 7. | The trailing surface of separation between the object and the air is 'sucked forwards' by the backwards travelling wave of rarefaction, as this is likewise a solid/air boundary and cannot offer resistance to the internal wave of low pressure. | This can be clearly seen to occur in the videos of the horizontally struck Slinky, bouncing spring and bouncing water droplets where their trailing surfaces are retracted as the wave of rarefaction strikes. |
| 8. | The backwards travelling wave of rarefaction is reflected as a forwards travelling pressure wave. | This can be seen to clearly occur in the video of the horizontally struck Slinky. |
| 9. | Harmonic motion rapidly develops. | Apart from the bouncing spring all of the videos demonstrate this. |
| 10. | An area of constant velocity is present at the centre of the object while the velocities of the object's leading and trailing edges vary between zero and twice the velocity of the object's centre. | Close observation of the videos of the bouncing water droplets and bouncing hula hoop is supportive of such a relationship being present. |
| 11. | The forward pulsing of the object's leading edge and the retraction of its trailing edge are out of phase by 180 degrees (π radians). | The videos of the bouncing hula hoop and bouncing water droplets are particularly supportive of this notion. |
| 12. | A mathematical model of translational harmonic motion suggests that the velocities of the leading and trailing edges of a moving object should vary in a sinusoidal manner between values of 0 and 2. In addition the leading and trailing edges should be out of phase by 180° (pi radians) so that when the leading edge has a velocity of 2 the trailing edge has a velocity of 0 and vice versa. Finally a central band of constant velocity equal to 1 should be present. | The animation in figure 2., based on the mathematical principles of translational harmonic motion produces a form of motion that corresponds (exactly) with the real motion of objects such as bouncing water droplets and bouncing hula hoops. |
There is also more general evidence supporting the idea that strictly forward motion is a consequence of a forwards travelling pressure wave and a backwards travelling wave of rarefaction. This comes from the simple fact that sound waves repetitively induce the backwards and forwards motion of air molecules as they pass. In particular sound pressure waves 'push' air molecules in a forwards direction, while the waves of rarefaction that follow 'suck' the air molecules backwards, leading to no net movement of the molecules.
If, however, the waves of compression and rarefaction were travelling in opposite directions then net movement would result as both types of waves are now acting to move the medium in the same direction.
Discussion & Conclusions
Simple Harmonic Motion versus Translational Harmonic Motion
The above analysis, along with the evidence presented to support it, indicates that while certain physical situations foster the backwards and forwards motion of particles about an equilibrium position to create simple harmonic motion (SHM), an alternative form of repetitive motion may also be possible which is translational in nature (i.e. what could be termed translational harmonic motion), capable of moving an object continuously through space.
In particular it is well known that if a force is applied to a flexible object that is fixed in space simple harmonic motion will result, as the object is forced to oscillate about an equilibrium position due to the relationship f=-kx known as Hooke's law. However the above analysis suggests that if a force is applied to a flexible object that is free in space translational motion should result due to the repetitive coordinated production of forward travelling compression waves and backwards travelling waves of rarefaction within the object.
This continuing translational motion is due to the fact that these waves should interact in a predictable way to produce a resonant frequency enabling the object to repetitively push and pull itself forward.
Most importantly this analysis relies upon the same physical principles and reasoning that are applied to the production of standing waves in air pipes (see article), and the underlying physics it is based upon is completely standard and well accepted.
Mechanical Motion in Free Space is Counterintuitive but has a Sound Explanation Based in Physics
Of course one significant barrier to accepting this notion is the fact that on the surface it seems counterintuitive. Everyday experience tells us that objects cannot push and pull themselves through empty space without actually pushing or pulling against something physical in their environment!
In fact it is rather easy to counter this stumbling block. Just consider the actual physics of the situation and in particular the mechanical explanation for the Slinky's magical defiance of gravity! Each tiny element of the Slinky is subject to two forces acting upon it pointing in opposite directions. Whether or not a particular Slinky element will move forward, stay in place or move backwards at a particular point in time is totally dependent upon the net force acting upon it through its immediate neighbours.
Critically it is not dependent upon anything that is external to the Slinky itself.
At the level of the whole object these harmonically interacting waves of compression and rarefaction thus determine the net force acting on each individual element, and it is their combined movement that results in translational motion. In other words each element is pushed and pulled along by its neighbouring elements without the need to grip or push against any external surface.
A Word about Inertia
More generally this raises an important theoretical point. In physics translational motion is generally attributed to translational inertia. This is simply a statement of fact. Isaac Newton's first law of motion states that a body at rest remains at rest, or, if in motion, remains in motion at a constant velocity unless acted on by a net external force; and this is precisely what happens in the real world. Exactly why a body should keep on moving once in motion, however, has not been adequately explained.
The main hypothesis was forwarded in 1883 by the Austrian physicist Ernst Mach who proposed that the movement of an object takes place with respect to the reference frame of the distant stars and galaxies and that this somehow explains the phenomenon of translational inertia. But this so-called Mach's Principle only remains in contention because there is nothing much better to refute or replace it.
Balanced against Mach's 'cosmic' view is our everyday experience which tells us that objects such as cars, planes and even people move because they have internal mechanisms such as ‘internal combustion engines’ powering them. When put in context, then, the concept of an object's movement being driven by a self-perpetuating internal mechanical mechanism seems far from outlandish, even obvious.
Force and Motion
The concept of translational harmonic motion also dovetails nicely with Newton's second law. This states that acceleration happens when a force acts on a mass (object). THM is the natural consequence of a force acting upon an unrestrained object, providing an explanation for the phenomenon.
The Invisibility of Translational Harmonic Motion
The real problem, here, is that the mechanics of this form of motion are only really observable in a select few objects. Slinkies, water droplets and hula hoops are capable of fostering visible vibrations and the mechanics of their movement is to some extent overt. However specialized equipment is required to analyze this motion.
Oscillators and Coupled Oscillators
Beyond this damping inevitably occurs and the visible oscillations gradually cease so that such objects eventually begin to move (translate) in a 'smooth' or 'classical' manner.
But what shouldn't be forgotten is that all of the objects in our universe are in reality coupled oscillators of immense complexity, and even the electron may not necessarily be a dimensionless point (some theories posit that it may be shaped something like a hula hoop!). In a closed system, as is the case of an object gliding through space, the phenomenon of damping presumably means that as macroscopic vibrations cease, they are replaced by vibrations in a legion of sub-oscillators, comprising the substance of the body.
However the law of conservation of momentum and the forward direction of the larger oscillations means that the minute, frictionless, quantum level oscillators that (presumably) eventually take over the task must continuously act in a forwards direction and thus exhibit translational rather than simple harmonic motion. In an ideal system this motion would then continue forever.
Translational Harmonic Motion Gels Well with Quantum Concepts
Finally, the model of translational harmonic motion, as presented above, has numerous features that suggest that it should be highly compatible with the field of quantum mechanics.
Matter waves and wave–particle duality are central to the theory of quantum mechanics, being first proposed by French physicist Louis de Broglie in 1924. Translational harmonic motion is, in a very real sense, nothing more than harmonically waving matter, and so is clearly well matched with the de Broglie hypothesis.
Moreover everything in the quantum world occurs in discrete steps and translational harmonic motion inherently requires the velocity of an object to increase in a stepwise manner. As observables such as momentum and kinetic energy are functions of velocity, they too should be quantized, if THM is a particle's underlying locomotor force.
In another vein the concept of the quantum harmonic oscillator is frequently called upon to model certain quantized physical phenomena such as the vibrations of diatomic molecules see article. A translational harmonic oscillator should prove to be equally useful, and may well be the correct explanation for dynamic (movement related) quantum phenomena.
Finally, THM could help explain one of the most puzzling aspects of quantum mechanics. That is the proposition that statistics and chance seem to guide much of a quantum particle's behaviour. If you think about a particle that is moving according to the rules of translational harmonic motion, then each of its individual elements is likely to be moving at a slightly different speed ranging from 0 to 2 velocity units. So what is the particle's actual speed? The answer is that it is an average speed, which calculates out as 1 speed unit (the actual speed is 1 speed unit multiplied by the number of nodes). The same argument then applies to momentum and kinetic energy, as each of the particle's elements will have differing momenta and energies due to the fact that individual segments are travelling at varying velocities. The particle's actual momentum and kinetic energy will therefore be the average of these tiny individual momenta and energies.
Perhaps?
Afterword
The idea of translational harmonic motion occurred to the author of this blog (Phil Wiren) after reading an article on inertia. Surprisingly, after a bit of digging around, the physics actually seemed to be highly supportive of the concept, which is why the blog is being posted.
Translational harmonic motion provides an internal mechanism to ‘motor’ translational inertia: Any force that acts on an object sets up a repetitive series of movements that then continue to push and pull the object along.
Of course, there may well be some fatal flaw in this analysis and the author would welcome any feedback, positive or negative.
The whole point of this blog is to simply introduce the idea and see if it stands up against the facts. So if you think that there is something in it please recommend the blog to any interested colleagues or friends to progress it. Also, let me know your thoughts. I can be contacted by email by clicking here or by phone on +61 431 908 941. Who knows? It may well be right!
Glossary of Terms
Damping is the phenomenon of a simple harmonic motion's amplitude continuously decreasing with time as the energy of the system is dissipated due to friction.
Displacement nodes and antinodes are points that undergo minimum (node) and maximum (antinode) displacements respectively, and in terms of pressure, are actually the opposite. For example when a standing wave forms in an air column there is always a displacement antinode and pressure node at any open end and a displacement node and pressure antinode at any closed end.
Elasticity is the ability of a body to resist a distorting influence and to return to its original size and shape when the force or distorting influence is removed.
The fundamental frequency is defined as the lowest frequency of a periodic waveform, being often referred to simply as the fundamental.
Harmonic motion is any form of motion that repeats each time the rotating element or machine component completes one complete cycle.
An object's harmonic frequencies are a set of integer multiples [2, 3, 4, ...] of the fundamental frequency. For example, the 2nd harmonic on a 60 Hz system is 2*60 or 120 Hz while the second harmonic of a 50 Hz system is 2* 50 or 100Hz.
The incident wave is the wave that is approaching the boundary, but hasn’t yet reached it.
Longitudinal waves consist of a periodic disturbance or vibration that takes place in the same direction as the advance of the wave. For example 'sound waves' moving through air repetitively compress then rarefy a gas medium in the same direction as the travel of the sound, with individual particles in the medium repetitively vibrating back and forth in the longitudinal direction.
A medium is a substance or material that can carry a wave. Critically it is not the wave and does not make the wave, but rather carries or transports the wave (disturbance) from its source to distant locations. Typical wave carrying media include ocean water, guitar strings, springs and air. However even a solid iron bar is quite capable of supporting waves.
A phase change may occur when a wave is reflected at a boundary. For example, when longitudinal wave travelling in a rarer medium is incident at the boundary of a denser medium the result is the same wave-form travelling in the opposite direction. This means that a compression wave travelling to the right, is reflected as a compression wave travelling to the left, and, likewise, a rarefaction travelling to the right is reflected as a rarefaction travelling to the left. By contrast, when a compression wave travelling in a denser medium is incident at the boundary of a rarer medium, the surface of separtion is 'pushed out' and the wave is reflected as its opposite so that a compression wave is reflected as a rarefaction wave and vice versa.
Pressure waves, such as sound waves, are a form of wave in which the propagated disturbance is a variation of pressure within the material or medium through which the wave is travelling. Pressure waves are also known as compression waves and in addition are sometimes referred to as P-waves.
The reflected wave is the wave that is moving away from the boundary in the same medium as the incident wave.
A rarefaction is a region in a longitudinal wave where the particles are farthest apart.
Simple harmonic motion is the repetitive back and forth movement through an equilibrium position, so that the maximum displacement on one side of this position is equal to the maximum displacement on the other side. In mathematical terms it can be described by the formula F = −kx, where F is the force, x is the displacement, and k is a constant.
A Standing wave or stationary wave is a wave that oscillates with respect to time but whose peak amplitude profile does not move in space. In other words the peak amplitude of the wave oscillations at any point in space is constant and independent of time; with the oscillations at different points throughout the wave being in phase. Importantly the locations on the standing wave at which the absolute value of the amplitude is minimum are called nodes, and the locations where the absolute value of the amplitude is maximum are called antinodes.
Translational motion is the form of motion that shifts a body from one point in space to another point in space.
Travelling waves, such as ocean waves, occur when a wave is not confined to a given position in space along a medium.
Copyright Phil Wiren